奔馳360度影像系統技術解析
汽車電子技術知識
08-06
奔馳車系不同的車型會有不同配置組合的駐車系統,如:低配車型裝配帶后視攝像頭的駐車組件(代碼P44),包含主動式駐車輔助系統(代碼235)和倒車影像(代碼218);高配車型裝配帶360°影像的駐車組件(代碼P47),包含主動式駐車輔助系統代碼235)和360°影像代碼501)。
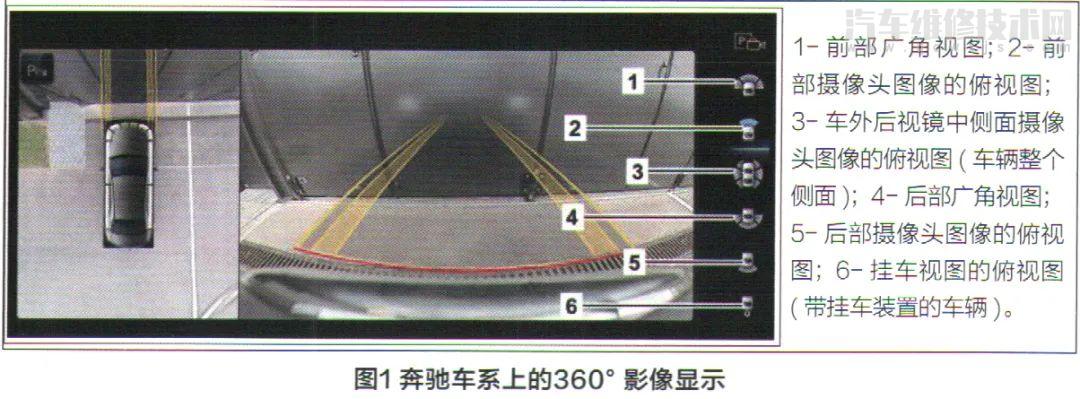
360°影像系統由4個攝像頭組成,分別集成在車輛前端(散熱器格柵內)、后端(釋放拉手內)以及左右側(兩側車外后視鏡外殼中)。這4個單獨的360°環視(廣角/魚眼)攝像頭獲取車輛周圍區域的圖像,經過圖像處理單元畸變還原、視角轉化、圖像拼接、圖像增強,最終形成一幅車輛四周無死角的360°全景俯視圖,并顯示在多媒體顯示屏上。同時,還會向駕駛員顯示動態和靜態引導線,并根據轉向角度形成車輛尺寸和行駛軌跡(行駛路徑)。這些影像能夠幫助駕駛員在駐車或挪車時,避免車輛碰撞到障礙物。通過對多媒體系統的操作,駕駛員可以選擇查看不同角度的360°影像。
360°影像系統中的每個攝像頭均為廣角鏡頭(180°水平視角和123°垂直視角),分辨率為100萬像素,由駐車系統控制單元N62為其提供5V的工作電壓。系統的工作原理下圖所示。
奔馳360°影像系統的數據傳輸技術經歷過2次技術變革。早期車型采用LVDS低電壓差動信號,最新車型則采用了HSVL高速視頻鏈接。例如:E級車(代號213),2021款之前使用的是LVDS技術,2021款(代碼801)開始采用HSVL技術。
LVDS(Low-Voltage Differential Signaling)低電壓差分信號,是一種低功耗、低誤碼率、低串擾和低輻射的差分信號技術,傳輸速率可達到155Mbit/s以上,其核心是采用極低的電壓擺幅高速差動傳輸數據。LVDS之所以成為目前高速I/O接口的高速數據傳輸的首選技術,主要是因為他在傳輸速度、功耗、抗噪性、EMI等方面所具有優勢,理論極限速率可達1.923Gbit/so LVDS應用于主機與顯示屏、攝像頭與駐車控制單元之間的視頻數字信號傳輸,并且可以發送音頻及控制命令,利用4芯同軸電纜作為傳輸載體。一根為電源線,一根為接地線,另外兩根類似于CAN總線的低壓差分信號(Rx+和Rx-)。LVDS通訊傳輸的工作原理如下圖所示。
隨著智能網聯技術的快速發展,LVDS已無法滿足車載網絡對視頻傳輸速度的要求,奔馳車系又開始采用新的視頻傳輸技術—高速視頻鏈接HSVL(HighSpeed Video Link)。與LVDS相比,HSVL的傳輸速度大幅提高。另外,由于LVDS采用了一種基于同軸線信號傳輸的電源疊加技術POC(Power Over Coaxial)技術,使得“小型用電器”可以省去單獨的供電線路。在同軸電纜中,既可以傳輸高頻信號、又可以傳輸電源。HSVL的傳輸載體是1芯同軸電纜,與LVDS的4芯同軸電纜相比,可靠性更高。HSVL最早被應用在2016款奔馳E級(代號213)車上,主要用于主機與顯示屏之間,以及駐車控制單元與主機之間的數據傳輸,但攝像頭與駐車控制單元之間仍然采用LVDS。
HSVL與LVDS兩種技術都是傳輸數字信號,電纜無法進行修復,限制插頭的插拔次數,且拔插頭之前需要先釋放靜電。他們的不同之處在于傳輸速率和傳輸載體。
www.011315.cn