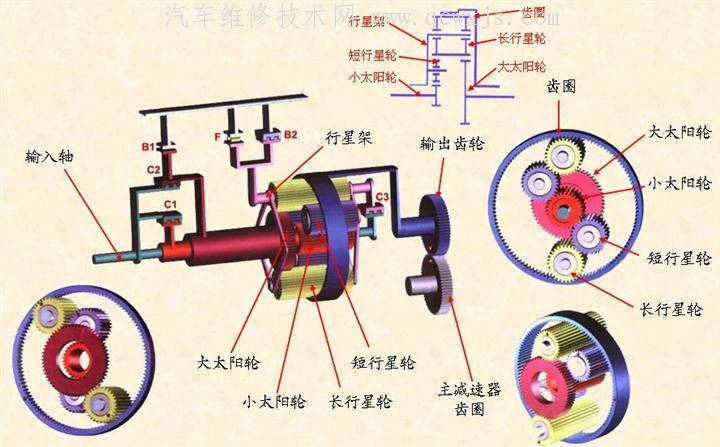
這是一種十分著名的行星齒輪機構,以設計發明者H.W.Simpson工程師命名的機構,從20世紀4O年代至今廣泛采用于世界各國的汽車自動變速器中,它的特點是由兩個完全相同的齒輪參數的行星排組成,見圖9.14。整個機構具有相同齒圈,六個相同的行星輪和一個供兩個行星排合用的加長太陽輪(故又稱共同太陽輪行星齒輪機構),它的前行星架和后齒圈為同一構件,并且和輸出軸連接。該機構可組成三個前進檔和一個倒檔。
1.各執行元件的功能
辛普森行星齒輪機構設置了五個變速執行元件:C1前多片離合器,C2后多片離合器、B1微動帶,B2后制動帶、F1
單向離合器。五個
變速執行元件的作用效果如下(見圖9.15)。
①當C1前多片離合器作用時,把來自渦輪輸出軸的動力接通至太陽輪。
②當C2后多片離合作用時,把來自渦輪輸出軸的動力接通至前排赤圈。
③當B1前制動帶作用時,固定太陽輪。
④當B2后制動帶作用時,固定后行星架。
⑤當F1單向離合器作用時,固定后行星架。
在辛普森機構中的B1和B2實際上是一種制動器,在某些變速器中該制動器采用制動帶,而在有些變速器中則采用多片離合器作為制動器,例如日本豐田的自動變速器。
表9.3反映了辛普森行星齒輪機構變速器變速執行元件的工作規律。
2.動力流分析
下面進行辛普森
機構各檔位的動力流分析。
l)l檔
把預選桿置于D
位置,C2后多片離合器作用把輸入動力傳給前齒圈,F1單向離合器作用,使后行星架固定不動。由于后排行星架被FI單向離合器固定,因此后排行星齒輪機構具有確定傳動比,且是
減速機構,另外后排行星齒輪機構通過后齒圈輸出,它的輸出轉速和轉動方向應該和前行星架保持一致,因為前行星架和后齒圈為同一構件。根據這兩個條件,就可以確定前行星架和太陽輪之間的轉速分配,顯然太陽輪的轉速比前行星架快得多。
太陽輪逆時針的旋轉帶動后行星輪順時針轉動,行星輪再帶動后齒圈順時針轉動,由于后齒圈順時針轉動時,會給后行星架施加一個逆時針的力矩,通過F1單向離合器將后行星架固定。后排行星齒輪機構的傳動比是后齒圈和太陽輪齒數之比,但
辛普森機構1檔傳動比要大得多,計算也更復雜且有確定的
傳動比。
辛普森機構的1檔具有汽車滑行
(機動車行駛時,把離合器分開或用空擋使傳動裝置脫離發動機,靠慣性前進。)
功能,當驅動輪的
轉速超過了
發動機的轉速之后,來自驅動輪的逆向動力通過后齒圈和前行星架輸入機構,使后行星架順時針旋轉,脫離F1單向離合器鎖止,實現了汽車滑行。當驅動輪轉速低于發動機時,單向離合器重新鎖止,變速器恢復驅動狀態。
若要在1檔實現發動機制動,則需要把預選桿置于L或1位置,此時后行星架被B2后制動帶固定,驅動輪逆向傳入的動力通過變速器將
發動機轉速提高,從而消耗動力使驅動輪轉速迅速下降,實現發動機制動。
2)2檔
C2后多片離合器和B1前制動帶同時作用。此時渦輪輸出軸經C2后多片離合器和前齒圈連接,同時太陽輪組件被B2后制動帶固定。
其動力經輸入軸傳給前齒圈,使之作順時針旋轉,由于太陽輪被固定,因此前行星輪在前齒圈帶動下,既有自轉,又隨行星架公轉,行星輪和行星架都是順時針轉動,行星架最后帶動輸出軸順時針旋轉。2檔傳動比取決于行星架當量齒數和前齒圈齒數之比,它是一種傳動比大于1的減速運動。2檔的傳動比僅僅和前排行星齒輪機構有關。
另外當輸出軸轉動時,同時會帶動后齒圈順時針轉動,后太陽輪已被固定,此時后行星輪和后行星架都順時針空轉F1 單向離合器處于釋放狀態。
在上述的辛普森機構的2檔工作狀態下(預選桿置于D位),來自
驅動輪的逆向傳入變速器的動力,可以直接傳至發動機,實現發動機制動。
3)3檔
C1前多片離合器和C2后多片離合器同時作用。C1前多片離合器的接合把動力傳至太陽輪,C2后多片離合器的接合把動力傳至前齒圈。根據上述行星齒輪機構特征:任意兩元件同速同方向旋轉即為直接檔,則機構鎖成一整體。在3檔狀態,前齒圈和太陽輪均有相同旋轉方向和速度。從另外角度分析,當來自C2后多片離合器的動力傳至前齒圈,再由前齒圈帶動太陽輪逆時針轉動,而來自C1前多片離合器的動力直接傳給太陽輪,使之順時針轉動,因此同一個太陽輪不可能出現兩個轉動方向,只能相互間鎖止成一整體。當機構整體順時針轉動時,n單向離合器和后行星架處于釋放狀態。3檔是直接檔,它的傳動比是1:1。
在3檔狀態下,只存在發動機制動的功能,而不存在汽車滑行的作用。
4)倒檔
C1前多片離合器和B2后制動帶同時作用。C1前多片離合器的接合把動力傳給太陽輪,B2后制動帶的作用使后行星架固定。此時動力經輸R入軸傳給了太陽輪并使其順時針轉動,因后行星架已被固定,后行星輪成了過渡輪,因此后行星輪是逆時針轉動,井使后齒圈也逆時針轉動,最終后齒圈帶動輸出軸逆時針旋轉。倒檔傳動比等于后齒圈齒數和太陽輪齒數之比,是傳動比大于1的減速運動。從上述可知,倒檔的傳動比僅僅和后排行星齒輪機構相關。