首頁
首頁 發動機
發動機 底盤
底盤 電器
電器 車身
車身 變速器
變速器 檢測
檢測 維護
維護 診斷
診斷 知識
知識 故障碼
故障碼
故障現象
一輛2018款福特探險者車,搭載2.3 L渦輪增壓缸內直噴發動機和6速手自一體變速器,累計行駛里程為4.8萬km。據駕駛人反映,之前車輛使用一切正常,在一次越野過程中,當經過一段非常顛簸的路面后,儀表盤突然出現報警提示,車輛可以正常駕駛,但是爬坡和越野能力明顯減弱,于是將車輛開至4S店進行檢修。
故障診斷
接車后首先試車驗證故障現象。接通點火開關,起動發動機,大約45 s后儀表盤開始交替出現“4WD故障 需要維修”“地形管理系統故障”等故障提示。用福特專用故障檢測儀(IDS)檢測,在動力傳動系統控制模塊(PCM)內存儲有故障代碼“P188D 全輪驅動繼電器模塊回饋電路”(圖1)。根據故障代碼的提示,結合該車的故障現象分析,初步判斷該車故障出在全輪驅動系統上。另外,由于地形管理系統需要使用全輪驅動系統的相關信息,故全輪驅動系統出現故障時地形管理系統也會報故障。

圖1 讀得的故障代碼(截屏)
查閱相關電路(圖2),得知PCM通過AWDC信號線向全輪驅動(AWD)繼電器模塊發出脈寬調制(PWM)信號,AWD繼電器模塊接收到PWM信號后向主動轉矩控制耦合器供電,此時主動轉矩控制耦合器鎖止,以實現前后輪的動力分配。同時AWD繼電器模塊通過AWDM信號線將PWM信號反饋給PCM,PCM以此判斷AWD系統工作是否正常。若AWD系統工作不正常,則PCM將會存儲相關的故障代碼。根據故障代碼的提示,并結合上述控制原理分析,推測可能的故障原因有:AWD繼電器模塊故障;PCM故障;相關的線路故障。

圖2 AWD系統控制電路
用IDS讀取怠速時AWD系統數據流(圖3),發現AWD_CLTCH_CMD #(AWD系統的控制指令,由PCM通過AWDC信號線發送給AWD繼電器模塊)的值為96.07%,正常;AWD_CLT_DIAGSIG(AWD系統的反饋信號,由AWD繼電器模塊通過AWDM信號線向PCM發送的占空比信號)的值為100%,不正常(正常情況下,該反饋信號值約為60%),與故障代碼“P188D 全輪驅動繼電器模塊回饋電路”的含義吻合。

圖3 讀取怠速時AWD系統數據流(截屏)
將示波器測試線連接在AWDM信號線上,測得AWDM信號線的反饋信號電壓一直為12 V,沒有占空比信號輸出。利用福特診斷軟件VMS所具有的信號發生器功能向AWDM信號線提供12 V、頻率為1 Hz、占空比為50%的信號電壓,此時IDS讀取的AWD_CLT_DIAGSIG的值為48.23%,說明PCM可以正常接收到AWDM信號線的PWM信號。既然PCM可以提供12V的基準電壓,又能夠正常接收到反饋信號,于是排除PCM存在故障的可能,懷疑是AWD繼電器模塊沒有提供反饋信號。
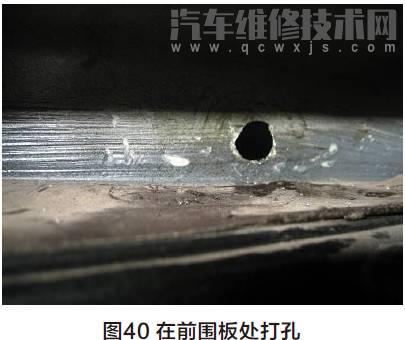
根據圖2 ,脫開AWD繼電器模塊導線連接器C4379,接通點火開關,用萬用表測量AWD繼電器模塊的端子1與端子4之間的電壓,為蓄電池電壓,說明AWD繼電器模塊的供電和搭鐵正常。斷開點火開關,脫開PCM導線連接器C1381B,用萬用表電阻擋測量AWDM繼電器模塊導線連接器C4379端子6與PCM導線連接器C1381B端子46之間線路的導通性,導通良好,且對電源無短路。挑出AWDM繼電器模塊導線連接器C4379端子6的連接線,重新連接AWD繼電器模塊導線連接器C4379和PCM導線連接器C1381B,接著用一根導線為AWD繼電器模塊端子6提供12 V的電壓,再次利用示波器測量端子6線路上的信號電壓,發現AWD繼電器模塊可以提供占空比信號,由此判斷AWD繼電器模塊是正常的,故障還是出在AWDM信號線上。仔細檢查AWDM信號線(圖4),發現AWD繼電器模塊導線連接器C4379端子6孔徑過大。分析認為,由于端子6接觸不良,使得AWM繼電器模塊無法向PCM提供反饋信號,PCM判斷AWD系統工作異常,進而在儀表盤上出現相關報警提示,并存儲故障代碼。

圖4 AWDM信號線
故障排除
重新修復AWD繼電器模塊導線連接器端子6后試車,上述故障現象不再出現,至此故障排除。